
私たちの身のまわりに溢れる商品は、産業用ロボットを前提にした生産ラインで作られているものが極めて多い。労働力の確保が社会課題となる中、ロボットの重要性はますます高まっているが、その運用には制約も多いのが現状だ。大きなハードルになっているのは「キャリブレーション」。つまり、ロボットやカメラの座標の変換誤差を校正することだが、チトセロボティクスが開発した産業用ロボット制御ソフトウェア「クルーボ」は、カメラを用いたビジュアルフィードバック技術で、そのキャリブレーションのハードルを大幅に下げるという。
ロボット未活用領域での自動化を大きく進める可能性と、ロボット活用の進展による社会的なメリットに迫る。
● 「産業用ロボット制御ソフトウェア」の発明
● ロボット制御に必須だった「キャリブレーション」
● キャリブレーションしなくてもいい「ビジュアルフィードバック」技術
● 日本の未来には、ロボット活用の推進が必要不可欠
「産業用ロボット制御ソフトウェア」は、“ありそうでないもの”だった
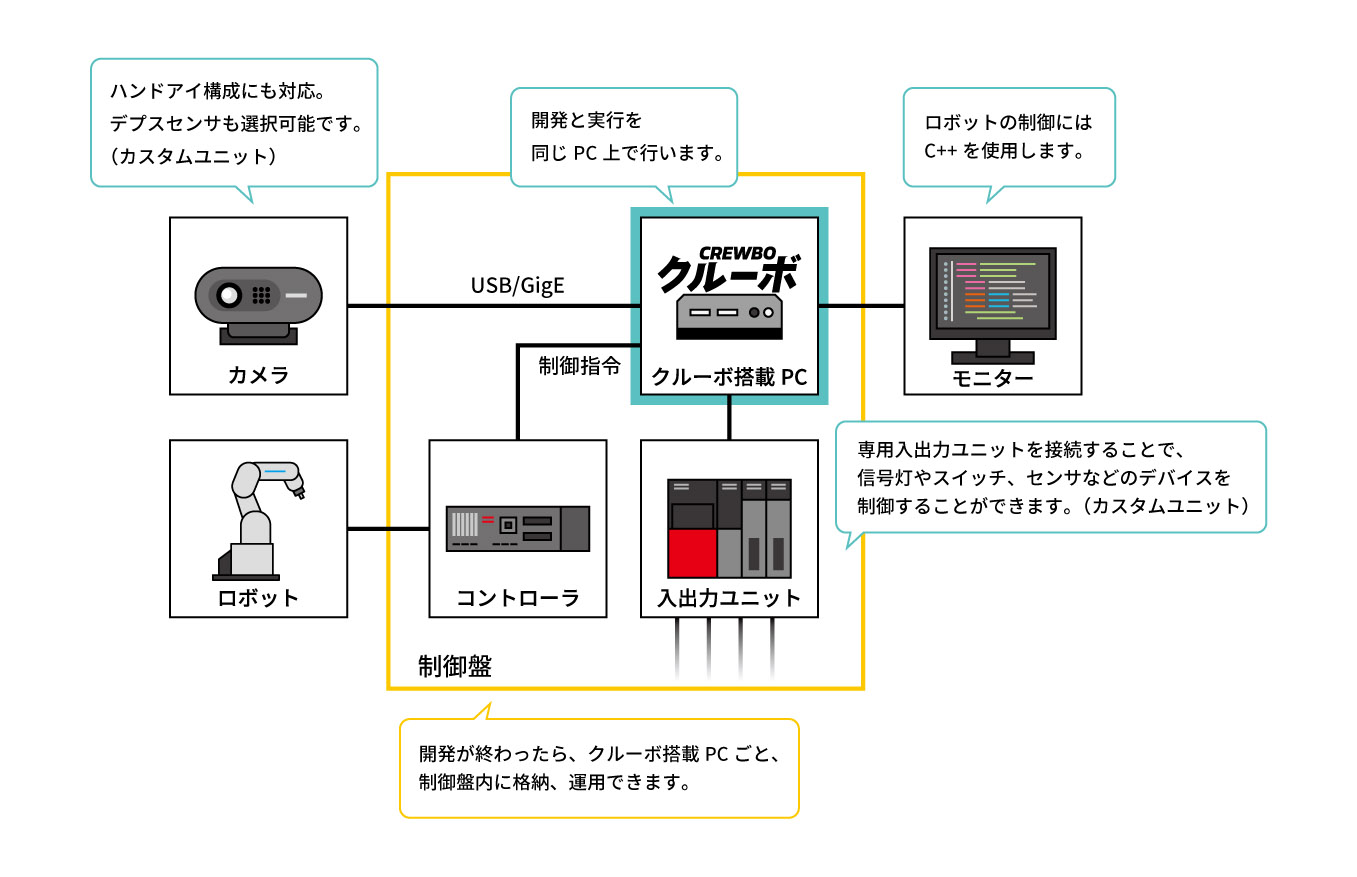
まずはこちらの動画を見ていただきたい。1台のロボットの先には針、1台には糸、そして2台にはカメラが付いており、すべてが産業用ロボット制御ソフトウェア「クルーボ」で制御されている。
「クルーボ」は、産業用ロボット制御ソフトウェアというジャンルのソリューションだ。ロボットをソフトウェアが制御する。上の動画でも4台のロボットが極めて精密に制御されていることがわかるだろう。
その事実には我々一般人も違和感はないが、実はこれまで、さまざまなメーカーや関連機器を横断して制御するソフトウェアは存在しなかったのだと、チトセロボティクスの西田亮介代表は話す。
「産業用ロボットの世界は、ロボット本体、つまりハードウェアが核になって構築されているので、メーカーが作ったロボットには専用のプログラムが付いていて、それでしか制御できないのが普通です。
『このロボットで、このセッティングで、この環境なら高精度に動きます』というのが当たり前の価値観であり、もちろんそれでも、これまで同様に十分にロボットを活用できます。
しかし、私たちがやりたかったのは、いかなる環境であっても、ロボットが環境に合わせて高精度に動作することでした。しかも、さまざまな機器を横断的に制御できるようなソフトウェアが必要だと考えていました。それを実現したのが『クルーボ』です」(西田代表、以下同じ)
環境に合わせてロボットが高精度に動く「キャリブレーション・フリー」
「いかなる環境でもロボットが高精度に動作する」。そのために重要なことの筆頭が、「キャリブレーション」だ。
ロボットは精密な動作を日々何万回も繰り返すわけだが、時間の経過とともにプログラムしてある座標位置からずれが発生する。そのため、始業時をはじめ、定期的にキャリブレーション(基準位置への調整)を行う必要がある。産業用ロボットの現場では、キャリブレーションは日常的かつ必須の作業といえるが、その手間と厳密さが、ロボットの導入が進まない要因にもなっているという。
「いま、私の後ろにもロボットがありますが、従来の教示再生方式では、このような移動式の台の上に乗ったロボットを高精度に制御することは不可能でした。座標系の誤差を極小化して、精度を高めようとしていたからです。
一方、クルーボでは、対象物と手先の相対位置/姿勢情報のみに着目してロボットを制御します。そのため、座標変換の誤差が累積することはなく、カメラとロボットの座標系は想定した設定位置/姿勢から大きくずれていても、まったく問題はありません」
つまり、産業用ロボットで大きな負荷となっていたキャリブレーションから解放されるわけだ。これによって、さまざまなメリットが生まれる。
「台車搭載ロボットなどがラフな環境でも動くことができたり、ロボット自体を移動させながら非常に高い精度の作業をすることも可能です。また、今回のリリースにあたり、当社の従来の制御よりも格段にスピードアップしています。
外部環境の変化にも柔軟に対応できることから、クルーボのように、カメラからの画像情報に基づいてロボットを制御するニーズが高まっているのです」
20μmでの高速・高精度制御を実現する「ビジュアルフィードバック」技術
カメラからの画像情報に基づくロボット制御、「ビジュアルフィードバック制御」がクルーボの革新的な技術といえる。
「冒頭で紹介した『針の穴に糸を通す』制御を例にすると、糸は重力によって垂れ下がるので、いつ変形するかわかりません。糸の形が安定していないため、従来方式ではいくら厳密にキャリブレーションしても穴に糸を通すことはできません。
クルーボではカメラが糸の先を常にモニタリングしながら、針の穴との位置関係を把握しているので、糸が垂れ下がって変形しても問題なく穴に通すことができます」
キャリブレーションの負担なく、20μm精度のビジュアルフィードバックを実現できるクルーボ。その可能性の片鱗を、実際にいくつかの動画でご覧いただこう。
【手で自由に動かしている棒を、ロボットハンドがなぞる】
【ランダムに置かれたやわらかい唐揚げをトレイに入れる】
【さまざまなサイズの商品をやさしくつかむ】
「ロボットにカメラが付いているので、例えば対象物がどんな形であっても、どうつかめばいいかを考えて動くことができます。パッケージのサイズや形がさまざまに変化する環境では、それぞれの形に応じてロボットの動きを登録しながら運用するのは現実的ではありません。
また、クルーボは20μmレベルの精度で動作するので、例えば落ちているポテトチップを割らずにつかむことも可能です」
実際、クルーボの制御を見た産業用ロボット業界からは、「オンラインデモはCG合成だと思った。できるわけがないから」という反応も多いという。実際に見て初めて「本当なんだ」と納得する。産業用ロボットの現場を知る人々にとって、クルーボの制御はそれほどまでにセンセーショナルなものなのだ。
来たる「労働供給制約社会」にロボットの活躍は欠かせない
その反響どおり、クルーボはすでに大手メーカーを含めた数多くの現場で活用されている。
「非常に精密な組み立てが必要な現場、布などのやわらかいファブリック部材を扱う製造ライン、不定形の食品、非常に微細な半導体チップの搬送などにも対応しています。クルーボは汎用的なソリューションなので用途は多岐にわたるのですが、大切なことは、『キャリブレーションできない』『精度が足りない』『動作スピードが足りない』といったハードルでロボットの導入、つまり作業の自動化を諦めていた現場にもロボット活用の道が拓けたことだと思います」
産業用ロボットが活躍できる現場が広がることは、今後人口減少社会を迎えることになる日本にとっても、極めて重要なことだといえる。リクルートワークス研究所の未来予測によれば、近い将来、日本に「労働供給制約社会」が来るというのだ。
少子化と高齢化により、単に後継者不足やデジタル人材の不足にとどまらず、「日本社会が国民の生活を維持するために必要な労働力を供給できなくなるのではないか」と懸念されている。
「ロボットの導入には、技術的な問題と費用的な問題と両方があり得ると思いますが、そのどちらも解決していくことが凄く大切だと考えています。『人手が減るのであれば、国の規模を小さくすればいい』という考え方は、私はあまり好きではありません。
2020年から始まったコロナ禍を通じて、我々が当たり前だと思っていた『生産・供給能力』がいかに脆弱であるかということが、わかったのではないでしょうか。生産力が国力を決める側面があることは間違いないので、より多くのシーンでロボットを活用できるように、言い換えれば『広く社会が受け入れてくれるように』ロボットや制御ソフトウェアを進化させていくことが重要だと考えています」
クルーボは2023年、中小企業優秀新技術・新製品賞を受賞した。持続可能な日本のために、極めて重要なロボット制御技術において、クルーボは間違いなくその先端をいくものだ。


西田亮介
6歳からロボット製作を始める。立命館大学在学中から2度の起業とロボット事業を経験。大学院卒業後、リクルートに入社。2018年チトセロボティクスを創業する。専門はロボット運動制御とコンピュータビジョン、技術経営(MOT)。